
Project description
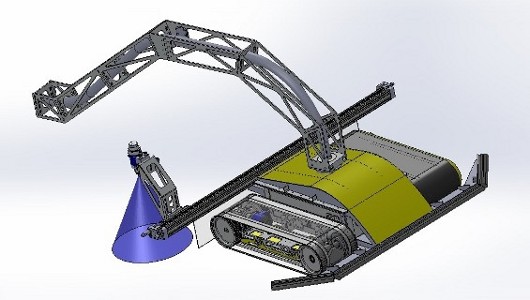
Large metal structures such as oil tanks and large ships require regular maintenance to reduce the effects of corrosion. Painting is one of the tasks regularly performed to increase the lifespan of these structures. However, the manual painting process takes a long time. Besides, it is unhealthy and unsafe for the worker.
The goal of this project is to design a robot, in cooperation with Instor and UNISC, and partially funded by SCIT/RS.



Goals
- Goal 1: build the magnetic tracked robot;
- Goal 2: design basic control for tele-operation;
- Goal 3: design simulation model;
- Goal 4: design robot tracking and autonomous navigation/painting.
Milestones
- Milestone 1: specify robot architecture, find and buy robot parts. 100%;
- Milestone 2: build the custom parts and build the robot hardware. 100%;
- Milestone 3: design software for tele-operation. 100%;
- Milestone 4: design driver to interface with Linux computer;
- Milestone 5: design camera-based robot tracking software. 30%;
- Milestone 6: design simulation model;
- Milestone 7: design navigation software and area coverage algorithms. 30%;
- Milestone 8: integrated test in simulation environment;
- Milestone 9: integrated test and field tests.
- Milestone 10: design software to control multiple robots in collaborative tasks;
People
Coordinator
- Alexandre Amory.
Academic Collaborators
- prof. Leonel Tedesco, GPSEM, UNISC University;
Students
- aluno 1, advised by Alexandre Amory, role: abcd.
- aluno 2, advised by Alexandre Amory, role: abcd.
- aluno 3, advised by Leonel Tedesco, role: abcd.
- aluno 4, advised by Alexandre Amory, role: abcd.
- currently looking for a interested student. It is an ideal project for TCC or master.
Papers
- title and link. full bibio data is already available at …
Repositories
Media
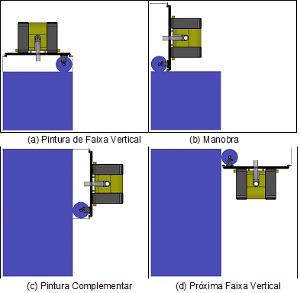
- Area coverage for the painter robot.
- Class about robotics presented in Pão dos Pobres, April, 2016.
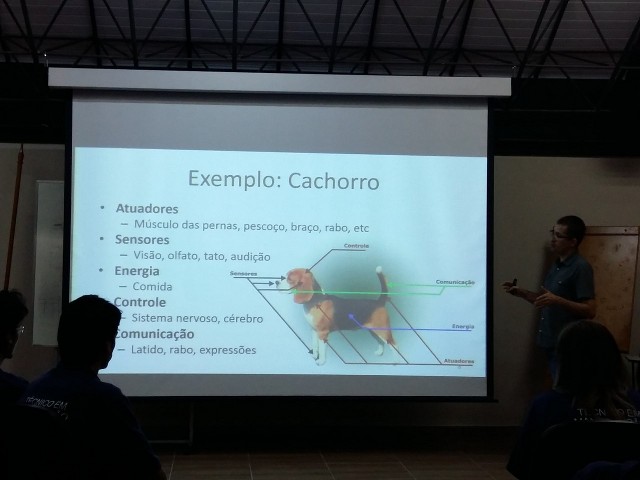
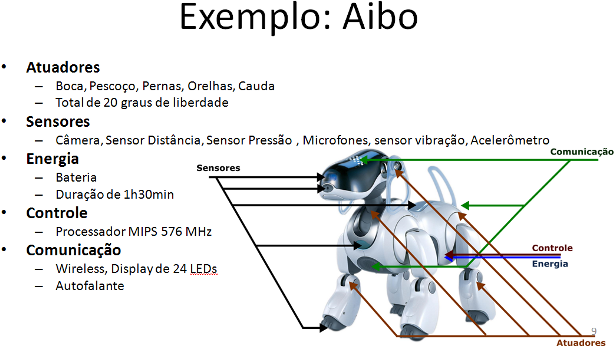
- Comparison with a dog and a robot dog
- Students watching the robot demo
